
- Hirdetés -
Óriási ipari potenciál rejlik az új, falmászó csigarobotban
A különleges eszközt a Bristoli Egyetem kutatói tervezték, és tényleg a csigák mozgása ihlette, hiszen kifejezetten falmászó robot építése volt a cél. A megvalósítás innovatív megközelítést igényelt, hiszen a robotot egyszerre kellett felruházni csúszó és szívó mechanizmussal, miközben meg kellett oldani a csiga nyálkájának helyettesítését is.
A Nature-ben bemutatott kutatás újszerű módot ismertet arra, hogy a robotok könnyedén másszanak falakat, amivel lehetővé válik nehezen hozzáférhető felületek (szélturbinalapátok, repülőgép és hajóburkolatok, felhőkarcolók üvegablakai stb.) autonóm ellenőrzése.
A csúszó-szívó mozgás a csigák legfontosabb tulajdonsága, amit érdemes robotikai megoldásokkal leutánozni, hiszen egyetlen nagy teherbírású tapadókoronggal is stabilan csúsznak, különböző felületeken. A hatékony tapadó mozgásmechanizmus kritikus tényezője a nyálkakiválasztás, ami csökkenti a súrlódást és fokozza a szívóerőt.

- Hirdetés -
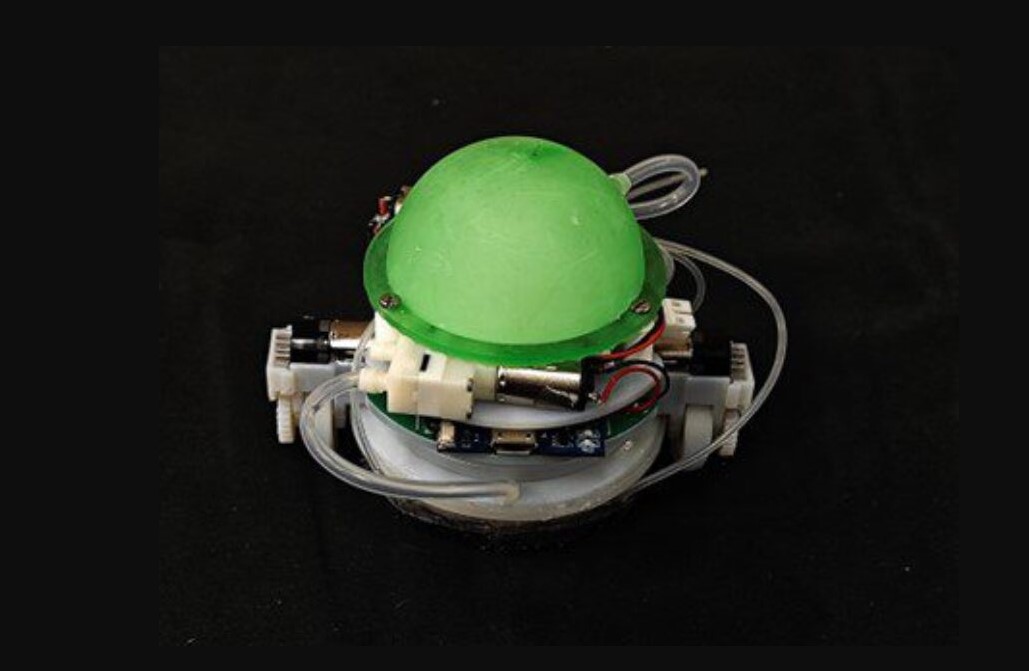
A nyálka helyettesítésére a legegyszerűbb, legolcsóbb és legfenntarthatóbb alternatívát választották, a vizet. Eközben optimalizálták a tapadókorong anyagát és megtervezték a robot mechatronikai rendszerét, hogy be tudják mutatni a robot gyakorlati alkalmazását – kísérleti szinten például egy 200 grammos tömeg hordozását és az akadályok kerülgetését. A robotról kiderült, hogy nagy terheléssel is elbír, hiszen egy kilogrammig, az önsúlyának tízszereséig tudták növelni a rá aggatott tömeget.
Gábor János, Okosipar.hu