
- Hirdetés -
E-IOT eszközökkel történő helymeghatározás (LBS és GNSS) – 2 .rész

A cikksorozat első részében az IoT eszközökben használható GSM modemek által támogatott műholdas GNSS és az egyéb – részben beltéri – helymeghatározási technikákat tekintettük át. Különbséget tettünk a műholdas, globális helymeghatározás és az ezt is magába foglaló, de sokkal szélesebb körű helyalapú szolgáltatás együttes az LBS között, valamit beszéltünk azokról a technológiákról is, melyek ezekre a célokra használhatóak. Jelen írásunkban áttekintjük, hogy az Endrich Bauelemente Vertriebs GmbH E-IoT eszközei hogyan támogatják a lokalizációt GNSS használatával, és az egyéb (beltéren alkalmazható) módszerek is bemutatásra kerülnek.
A műholdas globális helymeghatározás támogatása (GNSS) az LPWA E-IoT eszközökkel
A globális helymeghatározás támogatására az E-IoT eszközökben található FiboCom MA510 modem a beépített GNSS eszköze segítségével ad lehetőséget.
Az adatok eléréséhez az MCU a soros porton csatlakoztatott modemnek AT parancsokat küld, a visszaérkező adatokból lehet kifejteni a lokációra vonatkozó információkat. Maga a technika viszonylag egyszerű, a programozónak dolga csak a helyes adatok kinyerésével van, hiszen a válaszul kapott mondatok első ránézésre igen bonyolultnak tűnnek.

- Hirdetés -
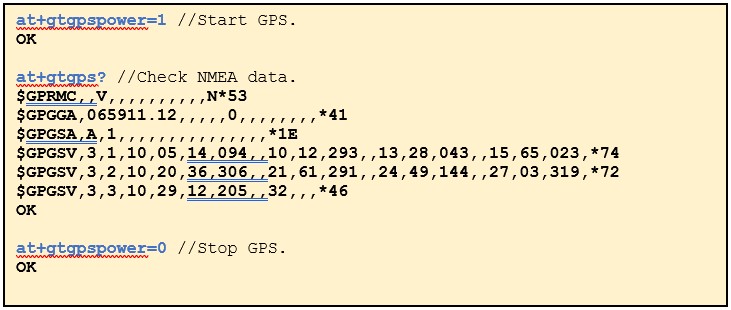
Lássunk egy kis értelmezést ezekről:
Az RMC, GGA, GSA, GSV és VTG mondatok olyan adatokat tartalmaznak, amelyeket a GNSS (Global Navigation Satellite System) rendszerek, például a GPS (Global Positioning System), küldenek egy adott hely és időpillanat alapján. Ezek a mondatok részletes információkat nyújtanak a műholdas navigációs rendszerek által mért és továbbított adatokról. Az alábbiakban egy részletes összefoglalót találhat az olvasó az egyes válaszokról:
RMC (Recommended Minimum Navigation Information): Az RMC mondat tartalmazza a GPS-es időt, a modul aktuális pozícióját (szélesség és hosszúság), a sebességét és az irányát. Fontos információkat szolgáltat a navigációs rendszer számára a jelenlegi helyzet és sebesség meghatározásához.
GGA (Global Positioning System Fix Data): A GGA mondat pontos koordinátákat tartalmaz, beleértve a szélességet, hosszúságot és a tengerszint feletti magasságot. További információkat ad a GPS-es időről, a használt műholdakról, a jelminőségről és a differenciált korrekciókról.
GSA (GNSS DOP and Active Satellites): A GSA mondat az aktív műholdakat és a geometriai pozíció pontosságát mutatja be.Tartalmazza a rendszer DOP (Dilution of Precision) értékeit, amelyek az elérhető műholdak geometriájától függenek.
GSV (GNSS Satellites in View): A GSV mondat információt szolgáltat az éppen látható műholdakról, azok számáról és jellemzőikről. Az adatok magukban foglalják a műholdak számát, az elevációs és az azimuth szögeket, valamint a jelek erősségét.
VTG (Course Over Ground and Ground Speed): A VTG mondat a modul földi sebességét és a tényleges irányát mutatja. Kiemelten fontos a navigációban, mivel a valós időben mért sebesség és irány információkkal szolgál.
Ezek az adatok együttesen segítik a GNSS vevőket a pontos és megbízható helymeghatározásban és navigációban. A mondatok egyesítése és értelmezése lehetővé teszi a vevőeszközök számára, hogy a lehető legpontosabban határozzák meg a felhasználó aktuális pozícióját és mozgását.

Az E-IoT eszközök bekapcsoláskor és napi egyszeri alkalommal ellenőrzik és beküldik a saját GPS pozíciójukat az E-Cloud szolgáltatásba. Természetesen beltéren ez a módszer sok esetben kivitelezhetetlen, mert az alkalmazott műholdas antenna és a GSM modembe épített GNSS modul együttes érzékenysége nem elegendő a helyadatok lekérdezéséhez. Ilyen esetben más módszerrel van lehetőség a lokalizációra, vagy egy a műholdas antennákhoz való csatlakozást lehetővé tevő beltéri „repeater” alkalmazása is megoldás lehet.
Az E-IoT E-Cloud szolgáltatásai közé tartozik a szenzorok adatainak megjelenítése a Google Maps szolgáltatásban.

A műholdas globális helymeghatározás támogatása (GNSS) az LTE CAT-1BIS E-IoT eszközökkel
A globális helymeghatározás támogatására az LTE-CAT-1BIS eszközökben is lehetőség van, mely azonban itt kiegészül a később ismertetésre kerülő torony információkon alapuló LBS helymeghatározással is.

A GPS helymeghatározást egypontos helymeghatározásra (abszolút helymeghatározás) és relatív helymeghatározásra (differenciális helymeghatározás) osztjuk fel. Az egyes GPS-műholdak pontos helyzetének és a fedélzeti atomóra által generált és folyamatosan továbbított navigációs információk felhasználásával a jel a műholdról való küldésének és a vevőre való érkezésének időkülönbsége kerül megállapítására. Ebből számítható a távolság az ismert pozíciójú műhold és a vevő között, több műhold adatait integrálva a vevő konkrét helyzetét pontosan meghatározhatjuk.
Technikai okok miatt a GPS rendszer minden műhold atomóráját tudja használni a pontos helymeghatározáshoz, de a korlátozott technológia miatt Kína még mindig nem tud minden műholdat elérni igy a BeiDou pontossága sokkal alacsonyabb. A GPS aktív helymeghatározást végez, ami azt jelenti, hogy 4 műholdat képes felhasználni a pozícionáláshoz, míg a BD-1 passzív helymeghatározást támogat 3 műhold bevonásával, így a pontosság viszonylag alacsony. A BD-2 jelenlegi működési elve hasonló a GPS-hez, mindkettő egypontos helymeghatározást (abszolút helymeghatározás) és relatív helymeghatározást támogat.
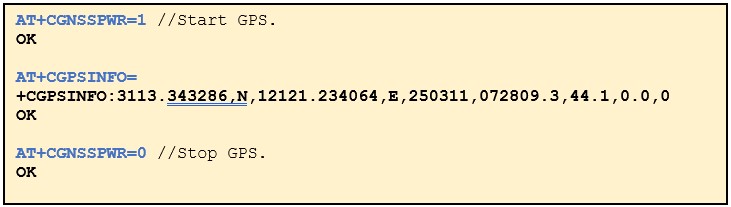
A SimCom SIM 7276G modul AT parancsai GNSS használatakor a következők:
A beltéri helymeghatározás támogatása az E-IoT eszközökkel
A globális helymeghatározás támogatására a pont-pont kommunikációt támogató (celluláris) E-IoT eszközökben található GSM modem a beépített GNSS eszköze segítségével ad lehetőséget. Ez a pontos helymeghatározás a cikksorozat előző részében ismertetett körülmények között kiválóan használható, azonban IoT eszközök fejlesztőinek szüksége lehet egy kevésbé energiaigényes, gyors és beltéren is használható módszerre is. Erre ad lehetősége a sok – elsősorban LTE – GSM modem által támogatott lehetőség az LBS – Location-Based Service, mely egy a GSM cellainformáción alapuló nyomkövető rendszer. Az LBS-n keresztüli követés kevésbé pontos a GPS-hez képest, mivel az eszköz csak megbecsüli a helyzetét a GSM cella területén, nem pedig a pontos GPS koordinátákkal dolgozik. Fontos megjegyezni, hogy a hagyományos LTE rendszer általában a 700 MHz és 2,6 GHz közötti frekvenciákat használja, míg az NB-IoT gyakran az alacsonyabb frekvenciákhoz, például az 800 MHz-hez vagy 900 MHz-hez kapcsolódik. Ebből következik, hogy az NB-IoT jelentősen nagyobb hullámhossza miatt, – melynek többek közt a sokkal jobb beltéri jelterjedési tulajdonságai is köszönhetők-, akár távolabbi toronnyal is képes kommunikálni. Általánosságban elmondható, hogy a 4G (LTE) tornyok sűrűbben vannak telepítve a nagyobb adatsebesség és sávszélesség biztosítása érdekében, míg az NB-IoT bázisállomások általában ritkábban vannak elhelyezve, mivel a kedvező jelterjedés, az alacsony adatforgalom és a kis energiafogyasztású eszközök kommunikációjához kisebb toronysűrűség is elegendő. Így az LBS pontossága 4G hálózatban sokkal magasabb, mint NB-IOT esetén, ahol ez megközelítheti akár az 500-550 métert.
A GSM (LBS) alapú lokalizáció esetén három nagyon komoly előny jelentkezik, mely sok esetben felülírja a pontossággal szembeni elvárásokat:
- Gyorsaság: Az LBS parancsok futásideje sokkal kisebb, ezért gyorsabban kapunk a bázisállomástól adatokat, mint a GNSS esetén a műholdakkal való kapcsolatteremtés során
- Energiahatékonyság: Ez az energiafelhasználás minimalizálásában is segít, hiszen LBS esetén nem kell a GSM modem GNSS modulját is használni, annak energiafogyasztása csökken, és a gyorsabb eredmény miatt a mikrovezérlőt is hamarabb tudjuk alacsony fogyasztású módba kapcsolni.
- Beltéri lokalizáció: A műholdjelekkel szemben a GSM jel épületen belül is fogható, ezért a beltéri használat sem problematikus.
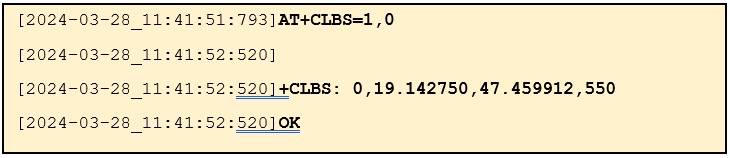
A szokásos use-case például vagyontárgyak nyomonkövetése esetén, hogy a rendszeresen használt LBS által észlelt helyváltoztatás hatására a rendszer megpróbál átváltani a sokkal pontosabb GNSS alapú helymeghatározásra, feltételezve, hogy az eszköz kültéren haladhat. Az LBS funkció eléréséhez a modemet a hálózatra kell kapcsolni, melyet az MCU a soros porton csatlakoztatott modem felé küldött AT parancsokkal old meg. Az LBS AT parancsok hatására visszaérkező adatokból lehet kifejteni a lokációra vonatkozó információkat. Maga a technika viszonylag egyszerű, a programozónak dolga még a helyes adatok kinyerésével sem nagyon van, hiszen a válaszul kapott karaktersorozat a GPS lokalizáció esetén visszakapott igen bonyolultnak tűnő mondatokkal szemben teljesen egyszerűek. A gyártók általában valamely saját vagy előfizetéssel / ingyenes hozzáféréssel elérhetó GSM bázisállomás geolokalizációs adatbázis segítségével oldják meg az LBS támogatást. A SimCom például kiterjedt saját adatbázist használ, a szerző több országban kipróbálta és – LTE modem használata esetén – 100-200m körüli pontosságot ért el még olyan egzotikusabb helyeken is, mint több Argentin város vagy például Brazíliában az Atlanti-parti Esőerdő. A saját szoftver infrastruktúra miatt a paraméterezés végtelenül egyszerű, amint azt a következő példakód is mutatja.
Mint a fenti példából is látszik a LONG és LAT adatok kevesebb, mint egy másodperc alatt rendelkezésre állnak a GSM modem UART kimenetén, ami a GPS alapú helymeghatározás esetén sokszor percekben mérhető, hiszen fel kel deríteni a szatelliteket is.
A másik az E-IoT eszközökben gyakran használt GSM modem gyártó egy nyílt adatbázist, az OpenCellId adatbázist használja a cella alapú helymeghatározáshoz, a lekérdezésekhez az ezen az oldalon ingyenesen generált vagy előfizetett TOKEN kulcsot kell paraméterként használni az AT +CLBS parancsnál.
Az E-IoT eszközben a soros porton visszakapott LAT és LONG adatokat visszafejtve és a szenzor mérési eredményekkel JSON telegramban a felhő alapú adatbázisba küldve később, az adatvizualizációkor földrajzi helyhez köthető a gyűjtött adat.
Az E-IoT E-Cloud szolgáltatásai közé tartozik a szenzorok adatainak megjelenítése a Google Maps szolgáltatásban.
A példában ismertetett lekérdezés eredménye például az alábbi képernyőfotón látható.

Bár a helymeghatározás témaköre korántsem olyan egyszerű, hogy egy-két cikkben átfogó képet kapjunk róla, vastag könyveket lehetne erről a témakörről írni, mégis remélem, hogy az IoT területén használható néhány fogást hasznos volt bemutatni. Egyelőre arra az ismeretanyagra szorítkoztunk, mely azokról a technológiákról szól, amit az E-IoT eszközökben alkalmaztunk. Szeretettel várjuk az elektronikai kiállításokon és konferenciánkon ahol ezekkel az eszközökkel a valóságban is megismerkedhet.
Kiss Zoltán, Export Igazgató – Head of R&D
Endrich Bauelemente Vertriebs GmbH
