
A mobil robotok mindenhol, a raktáraktól a kórházakig, de még az utcákon is megtalálhatók. Népszerűségük könnyen érthető; olcsóbbak, biztonságosabbak, könnyebben megtalálhatók és termelékenyebbek, mint az emberi személyzet. Könnyen méretezhetők vagy más gépekkel kombinálhatók. Mivel a mobil robotok sok valós idejű adatot gyűjtenek, a vállalatok IIoT-fejlődésében is segíthetnek.
A hatékony működéshez azonban a mobil robotoknak biztonságos és megbízható kommunikációra van szükségük. Cikkünk azokat a fő kommunikációs és biztonsági kihívásokat vázolja fel, amelyekkel a mobilrobot-gyártók szembesülnek, és egyszerű módot kínál ezen kihívások leküzdésére a mobil robotok mozgásban tartása érdekében.
Mik azok a mobil robotok?
Mielőtt belekezdenénk, határozzuk meg azt, hogy mit értünk mobil robotok alatt.
A mobil robotok anyagokat szállítanak egyik helyről a másikra, és két típusban kaphatók: automatizált irányított járművek (AGV) és autonóm mobil robotok (AMR). Az AGV-k irányító infrastruktúrát (reflektorokat, reflektorokat vagy mágnescsíkokat) használnak az előre meghatározott útvonalak követésére. Ha egy objektum elzárja az AGV útját, az AGV megáll, és megvárja, amíg az objektumot eltávolítják.

- Hirdetés -
Az AMR-ek dinamikusabbak. Térképeken navigálnak, és kamerákból, beépített érzékelőkből vagy lézerszkennerekből származó adatokat használnak környezetük észlelésére és a leghatékonyabb útvonal kiválasztására. Ha egy objektum blokkolja az AMR tervezett útvonalát, akkor egy másik útvonalat választ. Mivel az AMR-ek nem függenek az irányító infrastruktúrától, gyorsabban telepíthetők, és alkalmazkodni tudnak a logisztikai változásokhoz.
Milyen kommunikációs és biztonsági kihívásokkal néznek szembe a mobilrobot-gyártók?
1. Egy vezeték nélküli kapcsolat létrehozása
A mobilrobot-gyártók első kihívása a legmegfelelőbb vezeték nélküli technológia kiválasztása. A szokásos eljárás a követelmények megállapítása, a szabványok értékelése és a legjobb párosítás kiválasztása. Sajnos ez nem mindig lehetséges a mobilrobot-gyártók számára, mivel gyakran nem tudják a célalkalmazás pontos részleteit, sem azt, hol fogják telepíteni a gépet.
Néha a Bluetooth-kapcsolat számít ideálisnak, mivel stabil, nem túlterhelt kapcsolatot biztosít, míg más alkalmazásokhoz nagy sebességű, biztonságos mobilkapcsolatra van szükség. Ami hasznos lenne a mobilrobot-gyártók számára, az az, hogy olyan hálózati technológiával rendelkezzenek, ami könnyen módosítható, hogy az egyedi követelményeknek is megfeleljen.
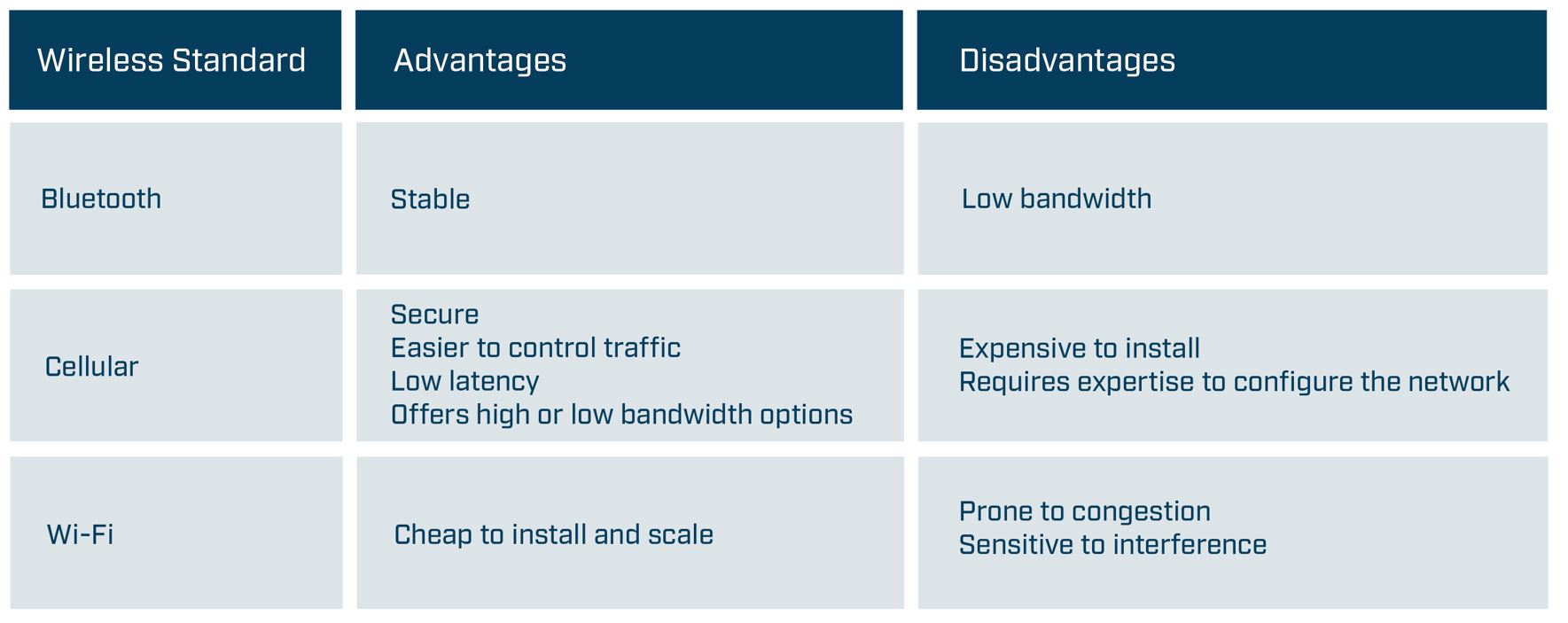
Vezeték nélküli szabvány – magas szintű előnyök és hátrányok
A második kihívás annak biztosítása, hogy a telepítés a tervek szerint működjön. Vezeték nélküli megoldás telepítése előtt végezzünk el a létesítmény rajzai alapján egy helyszíni felmérést, hogy az egész helyen biztosítsuk a mobil robotok megfelelő jellefedettségét. A helyszíni felmérésnek a hozzáférési pontok optimális helyét, a megfelelő antennatípust, az optimális antennaszöget és az interferencia csökkentésének módját kell meghatároznia. A telepítés után vezeték nélküli jelgyűjtő eszközökkel ellenőrizzük a kialakítást, és szükség szerint állítsuk be az AP-kat vagy az antennát.
2. A mobil robotok összekapcsolása ipari hálózatokkal
A mobil robotoknak annak ellenére is kommunikálniuk kell a megfelelő telephelyen lévő vezérlőkkel, hogy a mobil robotok és vezérlők gyakran különböző ipari protokollokat használnak. Egy AGV például használhat CANopen-t, míg a vezérlő PROFINET-et. Ezenkívül előfordulhat, hogy a mobilrobot-gyártók ugyanazt az AGV-modellt egy másik helyszínen szeretnék használni, ahol a vezérlő már egy másik ipari hálózatot, például EtherCAT-et használ.
A mobilrobot-gyártóknak arról is gondoskodniuk kell, hogy mobil robotjaik elegendő kapacitással rendelkezzenek a szükséges adatmennyiség feldolgozásához. A szükséges adatmennyiség a telepítés méretétől és típusától függően változik. A nagy létesítmények több adatot használhatnak, mivel az útválasztási algoritmusoknak nagyobb területet, több járművet és több lehetséges útvonalat kell lefedniük. Az olyan navigációs rendszerek, mint például a látásnavigáció, képeket dolgoznak fel, éppen ezért nagyobb feldolgozási teljesítményt igényelnek, mint a más navigációs rendszereket, például reflektorokat használó berendezések. Ebből kifolyólag a mobilrobot-gyártóknak a következő kihívásokat kell megoldaniuk:
- Olyan hálózati technológiára van szükségük, ami az összes nagyobb terepi busz és ipari Ethernet hálózatot támogatja.
- A hálózati technológia megváltoztatásának egyszerűen kell lennie, hogy a mobil robot ugyanazon az ipari hálózaton kommunikálhasson, mint a vezérlő, anélkül, hogy a hardver kialakítását megváltoztatná.
- Biztosítaniuk kell, hogy a hálózati technológia elegendő kapacitással és funkcionalitással rendelkezzen a szükséges adatok feldolgozásához.
3. Egy biztonságos rendszer létrehozása
Kritikus, de kihívást jelentő feladat egy olyan rendszer létrehozása, amelyben a mobil robotok biztonságosan szállíthatnak anyagot. A mobilrobot-gyártóknak olyan rendszert kell létrehozniuk, ami figyelembe veszi a környezetben lévő mobil robotok, szerkezetek és munkavállalók összes változatát. Gondoskodniuk kell arról, hogy a mobil robotok reagáljanak a külső cselekvésekre, például ha valaki kinyitja a biztonsági ajtót vagy megnyomja a vészleállító gombot, és hogy a hálózati megoldás képes legyen feldolgozni a különböző biztonsági protokollokat és interfészeket. Figyelembe kell venniük az AMR-ek szabad mozgását, és ennek megfelelően kell kezelniük az ütközések kockázatát. Az érzékelő technológia folyamatosan fejlődik, és a mobilrobot-gyártóknak követniük kell a fejlesztéseket, hogy termékeik a lehető leghatékonyabbak maradjanak.

Biztonsági szabványok
A biztonsági szabványok iránymutatást adnak a biztonsággal kapcsolatos alkatrészek beépítéséhez, a környezet előkészítéséhez és a gépek vagy berendezések karbantartásához.
Míg a különböző biztonsági szabványok (ISO, DIN, IEC, ANSI stb.) betartása többnyire önkéntes alapon történik, az Európai Unióban a gépgyártóknak törvényi kötelezettségük van a gépi irányelvekben szereplő biztonsági előírásokat betartására. A gépekről szóló 2006/42/EK irányelv mindig hatályos a mobil robotok gyártóira, és bizonyos alkalmazásokban a 2014/30/EU irányelv is releváns lehet, mivel a berendezések elektromágneses kompatibilitását szabályozza. A 2006/42/EK gépi irányelv az európai piacra bevezetett biztonságos gépek tervezésére és gyártására vonatkozó követelményeket írja le. A gyártók csak akkor helyezhetnek el CE-jelölést és szállíthatják ki a gépet a megrendelőnek, ha a megfelelőségi nyilatkozatban bizonyítani tudják, hogy teljesítették az irányelvben leírt követelményeiket.
Bár a többi biztonsági szabvány nem kötelező, a gyártóknak továbbra is be kell tartaniuk azokat, mivel elősegítik a gépekről szóló 2006/42/EK irányelv követelményeinek teljesítését. Például a gyártók követhetik az ISO 12100 útmutatásait, hogy az azonosított kockázatokat egy elfogadható szintű fennmaradó kockázatra csökkentsék. Használhatják az ISO 13849 vagy IEC 62061 szabványokat, hogy meghatározzák az egyes kockázatokhoz szükséges biztonsági szintet, és biztosítsák, hogy a megfelelő biztonsággal kapcsolatos funkció megfeleljen a meghatározott követelményeknek. A mobilrobot-gyártók döntik el, hogyan érik el a kívánt biztonsági szintet. Csökkenthetik például a mobil robot sebességét, hogy elfogadható szintre mérsékeljék az ütközések kockázatát és a sérülések súlyosságát. Vagy biztosíthatják, hogy a mobil robotok csak olyan elkülönített zónákban működjenek, ahol tilos az emberi hozzáférés (az ISO 3691-4 szabvány szerinti zárt zónák).
A megfelelő szabványok meghatározása és a követelmények végrehajtása a legjobb módja annak, hogy a mobilrobot-gyártók biztonságos rendszert hozzanak létre. De ahogy ez az összefoglaló is sugallja, ez egy bonyolult és időigényes folyamat.
4. Megbízható CAN-kommunikáció biztosítása
Az 1980-as évek óta megbízható és könnyen megvalósítható szabványnak számító, CAN technológián alapuló kommunikáció továbbra is egyre népszerűbb, főként az olyan virágzó iparágakban való használatának köszönhetően, mint az elektromobilitás és az akkumulátoros energiatároló rendszerek (BESS). A CAN egyszerű, energia- és költséghatékony. A hálózaton lévő összes eszköz hozzáférhet az összes információhoz, és a nyílt szabványnak köszönhetően a felhasználók az igényeiknek megfelelően adaptálhatják és terjeszthetik ki az üzeneteket.
A mobilrobot-gyártók számára a CAN-kapcsolat létrehozása még fontosabbá válik, mivel ez teszi lehetővé a mobil robotok hajtásrendszerében egyre gyakrabban használt lítium-ion akkumulátorok akár utólagos, akár új telepítésekben történő monitorozását. A mobilrobot-gyártóknak a következőket kell tenniük:
- Hozzanak létre megbízható kapcsolatot a CAN vagy a CANopen kommunikációs szabványokkal, hogy ellenőrizhessék eszközeiket, például figyeljék az akkumulátor állapotát és teljesítményét.
- Védje a rendszereket az elektromágneses interferenciától (EMI), mivel az EMI tönkreteheti a rendszer elektronikáját. Az EMI kockázata az utólagos telepítéseknél is jelentős, mivel a kommunikációs kábel mellé új alkatrészek, például akkumulátorok hozzáadása nagyfrekvenciás elektromágneses zavarokat eredményez.
5. Távoli hozzáférés a mobil robotokhoz
A gép vezérlőrendszerének távoli elérése lehetővé teszi a mobil robotgyártók vagy mérnökség számára, hogy a legtöbb problémát a helyszínre kiszállás nélkül is elhárítsák és megoldják.
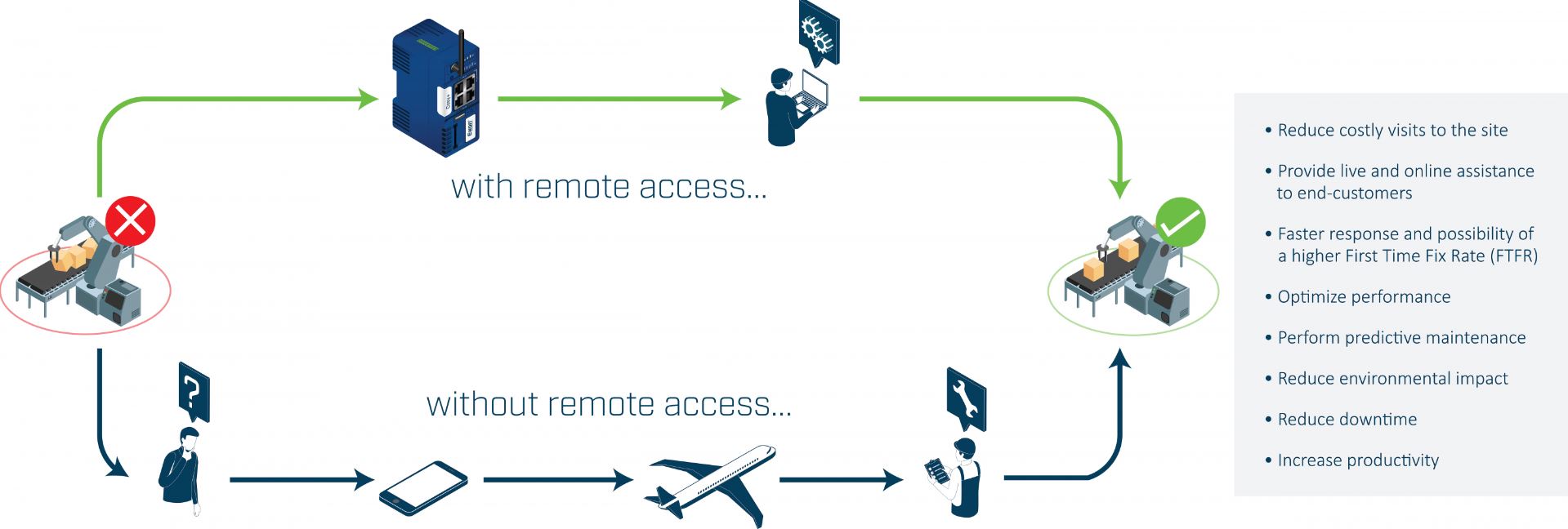
A kihívás egy olyan távelérési megoldás létrehozása, amely egyensúlyt teremt az IT részleg és a mérnökség vagy beszállító igényei között.
Az informatikai részleg biztosítani akarja, hogy a hálózat biztonságos, megbízható és sértetlen maradjon. Ennek eredményeként a távoli hozzáférési megoldásnak a következő biztonsági intézkedéseket kell tartalmaznia:
- Kimenő kapcsolatokat használjon a bejövő kapcsolatok helyett, hogy minimálisra csökkentse a tűzfalra gyakorolt hatást.
- Válassza le a releváns forgalmat a hálózat többi részétől.
- Titkosítsa és védje az összes forgalmat, hogy biztosítsa annak titkosságát és integritását.
- Győződjön meg arról, hogy a beszállítók a vonatkozó biztonsági szabványoknak, például az ISO 27001 szabványnak megfelelően dolgoznak
- Gondoskodjon arról, hogy a beszállítók rendszeres biztonsági auditokat végezzenek.
A mérnök vagy a kereskedő egy könnyen használható és megbízható rendszert szeretne. A felhasználók könnyen csatlakozhatnak a mobil robotokhoz, és hozzáférhetnek a szükséges információkhoz. Ha a gyártási környezet módosul, a robotok száma könnyen méretezhető. Ha a mobil robotok a gyártóktól vagy mérnökségtől eltérő országban működnek, akkor a hálózati infrastruktúrának elegendő lefedettséggel és redundanciával kell rendelkeznie ahhoz, hogy világszerte garantálja a rendelkezésre állást.
Következtetés
Amint láttuk, a mobilrobot-gyártóknak számos kommunikációs és biztonsági kihívást kell megoldaniuk. Vezeték nélküli kapcsolatot kell létrehozniuk, adatokat kell küldeniük különböző hálózatokon, gondoskodniuk kell a biztonságról, csatlakozniuk kell a CAN-rendszerekhez, és távolról is biztonságosan kell hozzáférniük a robotokhoz. És hogy ez még bonyolultabb legyen, minden telepítést újra kell értékelni, és hozzá kell igazítani a helyszíni követelményekhez.
A mobil robotkommunikáció megvalósításának legjobb gyakorlata
A mobilrobot-gyártók ritkán kommunikációs vagy biztonsági szakértők. Ebből kifolyólag időigényesnek és költségesnek találhatják a szükséges kommunikációs technológia házon belüli kifejlesztését. A harmadik féltől származó, célzott kommunikációs megoldások igénybevétele nemcsak a kommunikációs kihívásokat oldja meg, hanem egyéb előnyökkel is jár.
A modern kommunikációs megoldások moduláris felépítésűek, amelyek lehetővé teszik a mobilrobot-gyártók számára, hogy eltávolítsanak egy adott szabványhoz vagy protokollhoz tervezett hálózati terméket, és azt egy másik szabványhoz vagy protokollhoz tervezett termékkel helyettesítsék anélkül, hogy a gép bármely más részét érintenék. Az egyik telepítésnél például a Bluetooth lehet a legalkalmasabb vezeték nélküli szabvány, míg egy másik telepítésben a Wi-Fi biztosíthat jobb lefedettséget. Hasonlóképpen, az egyik telephely a PROFINET és PROFIsafe, míg egy másik ezektől eltérő ipari és biztonsági protokollokat használhat. Mindkét forgatókönyvben a mobilrobot-gyártók kommunikációs termékekkel módosíthatják a hálózati technológiát, hogy anélkül megfeleljenek a helyi követelményeknek, hogy bármiféle változtatást eszközölnének a hardver kialakításában.
Szerzők:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
